

Blog

Our Device Explorer app works with any currently supported Windows PC and allows you to easily test, configure as well as run a few sample programs that demonstrate the capabilities inclinometers and encoders. Read More »
Published 9/4/2025 in Blog

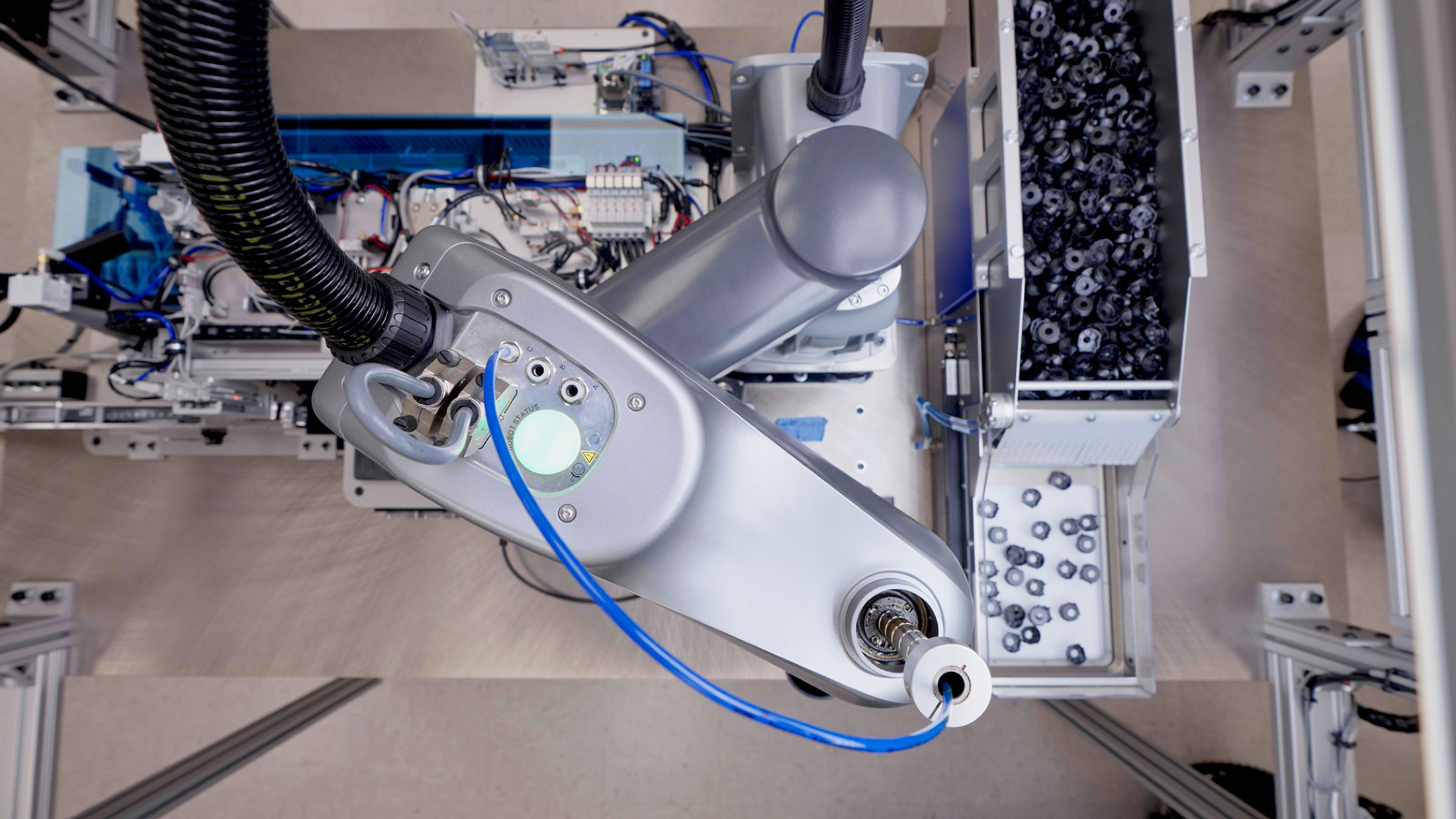
Want a quick overview of motor encoders? This blog discusses what they are, what they do, how they work, and how automation systems use them. Read More »
Published 6/16/2025 in Blog
When one of our customers was having trouble getting our T7 Networked Absolute Inclinometer to communicate with an existing system, we decided that the best path forward was to develop custom firmware so the T7 would be plug-and-play with their system. Read More »
Published 6/5/2025 in Blog
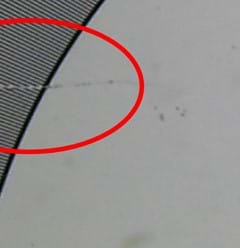
What is the best way to clean rotary encoder disks or linear encoder strips of small dust and particles? When it comes to our optical and transmissive encoders, the best option is probably to actually just leave things alone. Read the post to learn more. Read More »
Published 11/13/2024 in Blog

When one of our customers needed an encoder modified to work for their application, we turned around a custom variant for them within a matter of weeks. Read More »
Published 11/13/2024 in Blog
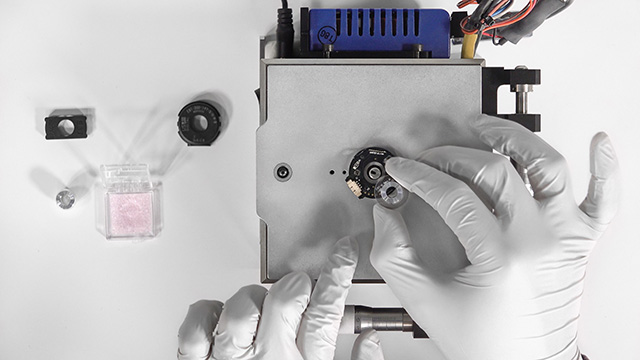
When one of our Mechanical Engineers was looking to automate an assembly process, his design included a robot with absolute positioning capability. Read More »
Published 11/13/2024 in Blog

We put a serial number on every one of our EM1 and EM2 modules and a manufacturer order number on encoder covers to track when individual components were made. Read More »
Published 11/13/2024 in Blog
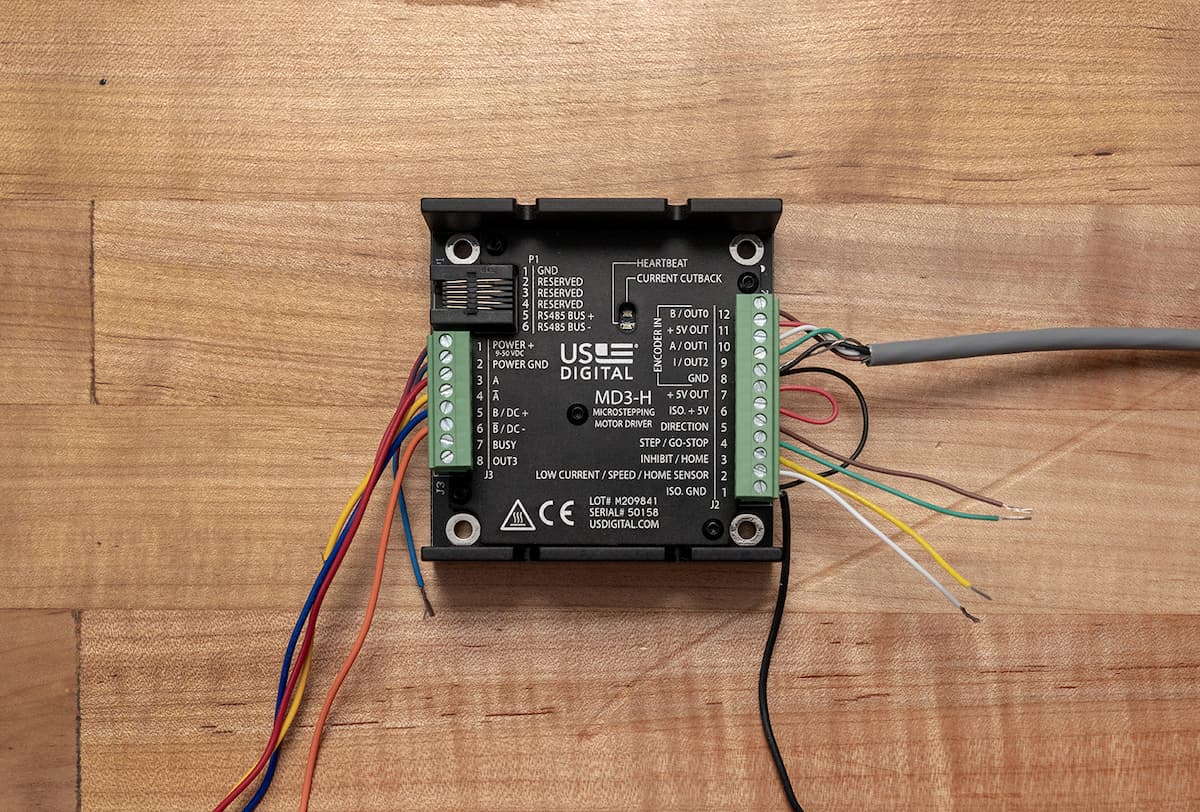
Our MD3 stepper motor driver can drive size 14 to 42 stepper motors from full stepping up to 256 microsteps per step. In this blog post we’re going to walk you through how to set up the MD3 and configure it using a Windows PC. Read More »
Published 11/13/2024 in Blog

You can save a little bit of cash on your encoder purchase if you order in bulk, but that isn’t always the best-case option for all our customers. In this blog post we’re going to do a deep dive on our packaging options to help you make an informed decision. Read More »
Published 11/13/2024 in Blog

Anyone with a PC running Windows and a US Digital Quadrature to USB Adapter (QSB) can run the Quick Check for QSB software to quickly verify that an encoder’s expected resolution matches its actual one in 5 easy steps. Read More »
Published 11/13/2024 in Blog
More in News
Company Links
- About Us
- Careers
- Contact Details
- Distributors
- Environmental Stewardship
- Legal
- Quality and Compliance
- Videos
Stay up to date
Sign up for our newsletter to stay up to date with our product updates, blog posts, videos and white papers.