
News

US Digital has entered the land of video podcasting with our new show “Incremental Chats.” Read More »
Published in News > Blog

Global supply chain uncertainty seems to be the new normal at times. That's why at US Digital, we place the utmost priority on keeping our lead times short and components available. Read More »
Published in News > Blog

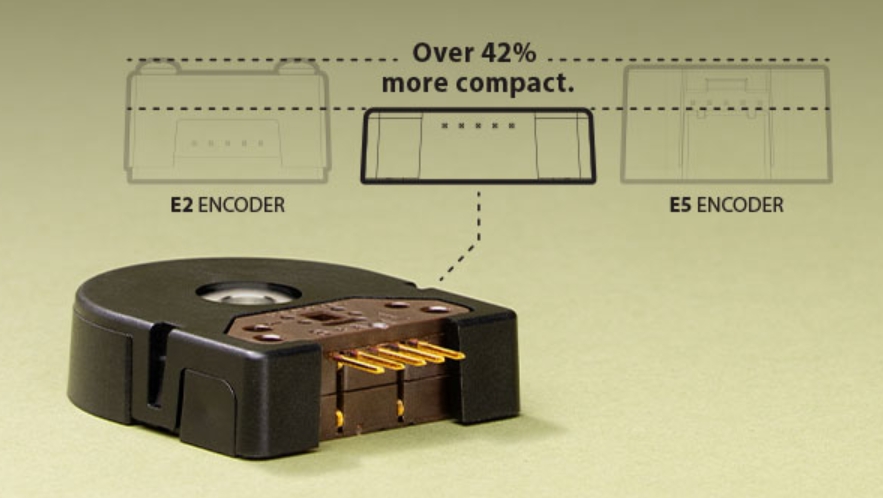
The L2 Low-Profile Motor Encoder now includes higher resolutions in the same compact package which makes it a great choice for constrained space applications. Read More »
Published in News > Press Releases

Custom Encoders are just one of the ways US Digital shows how much we care for our customers. Let’s work together to create the custom encoder you need. Read More »
Published in News > Blog

Discover how US Digital simplifies processes for its customers and employees, with a focus on their ongoing success. How can we contribute to your success? Read More »
Published in News > Blog

Discover how US Digital simplifies processes for its customers and employees, with a focus on their ongoing success. How can we contribute to your success? Read More »
Published in News > Blog

Discover how US Digital simplifies processes for its customers and employees, with a focus on their ongoing success. How can we contribute to your success? Read More »
Published in News > Blog
Press release regarding the L2 low-profile motor. Being only 0.398 in. tall, it can fit in much tighter places using the proven technology of the EM1. Read More »
Published in News > Press Releases

The ED4 encoder display is a replacement for the ED3 encoder display but is much easier to use, now with a color screen, and many more options. Read More »
Published in News > Press Releases
US Digital's participation in the 2025 SPS exhibition was announced . The exhibition was held in Nuremburg Germany where we attend most years. Read More »
Published in News > Events
More in News
Stay up to date
Sign up for our newsletter to stay up to date with our product updates, blog posts, videos and white papers.