

Blog

Global supply chain uncertainty seems to be the new normal at times. That's why at US Digital, we place the utmost priority on keeping our lead times short and components available. Read More »
Published in News > Blog

Custom Encoders are just one of the ways US Digital shows how much we care for our customers. Let’s work together to create the custom encoder you need. Read More »
Published in News > Blog

Discover how US Digital simplifies processes for its customers and employees, with a focus on their ongoing success. How can we contribute to your success? Read More »
Published in News > Blog

Discover how US Digital simplifies processes for its customers and employees, with a focus on their ongoing success. How can we contribute to your success? Read More »
Published in News > Blog

Discover how US Digital simplifies processes for its customers and employees, with a focus on their ongoing success. How can we contribute to your success? Read More »
Published in News > Blog

What is a motor encoder? How do encoders work on a motor? What does an encoder do on a motor? Get these and more questions answered here. Read More »
Published in News > Blog

This is a case study of how we went the extra mile for one of our customers. That is what we do. Put us to the test. How can we help you? Read More »
Published in News > Blog
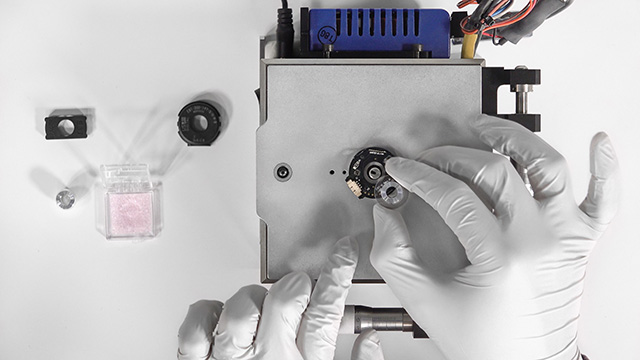
Need to clean one of our optical encoders. This article will provide you good options--and tell you what not to do so the encoder will continue to work. Read More »
Published in News > Blog

When one of our customers needed an encoder modified to work for their application, we turned around a custom variant for them within a matter of weeks. Read More »
Published in News > Blog
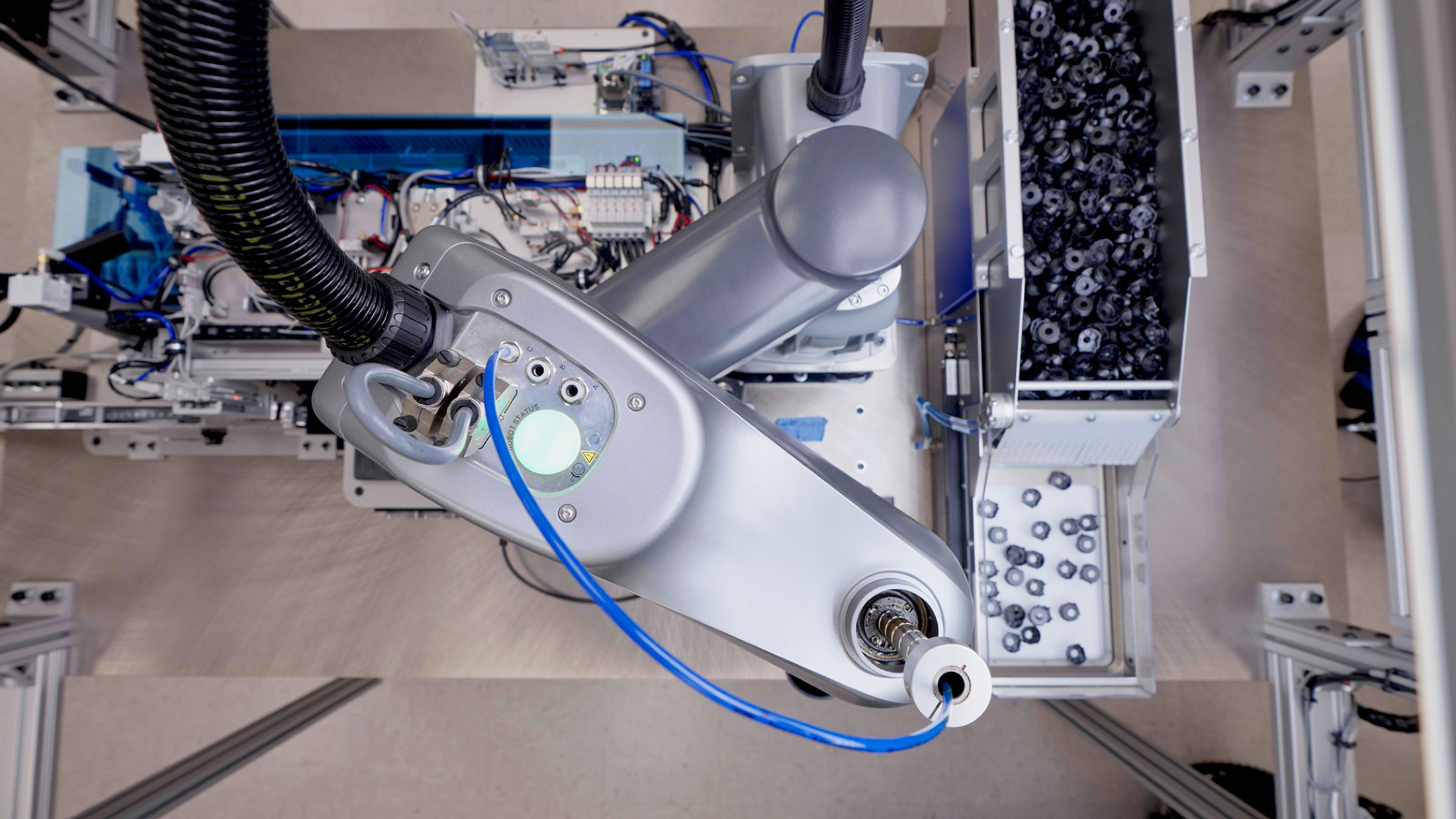
When one of our Mechanical Engineers was looking to automate an assembly process, his design included a robot with absolute positioning capability. Read More »
Published in News > Blog
More in News
Company Links
- About Us
- Careers
- Contact Details
- Distributors
- Resource Integrity
- Legal
- Quality and Compliance
- Videos
Stay up to date
Sign up for our newsletter to stay up to date with our product updates, blog posts, videos and white papers.