

Have you ever been in the middle of counting something and lost your place? If you didn’t have a system or way of recalibrating where you are, you’re going to have to just start over from scratch. Turns out this can happen with encoders too. If you are designing a system where you can’t let that happen, you’re going to want to know what an Index is.
An Index is a unique channel on an encoder disk that can be used to return a system to a zero or home position after a loss of power. Not all encoders have an Index position and not all applications would require or need one.
What happens to an encoder after a loss of power?
When power is restored to an encoder without Index, the encoder doesn’t know where in the rotation it is because each set of lines and the space between them is identical to the next. It can start counting over again from 0, but it has no way of returning to a fixed position.
When power is restored to an encoder with Index, the system can start turning until it finds the Index position. Once it is found, the system’s exact location is known.
Let’s get into how that works on our encoders.
How does index work?
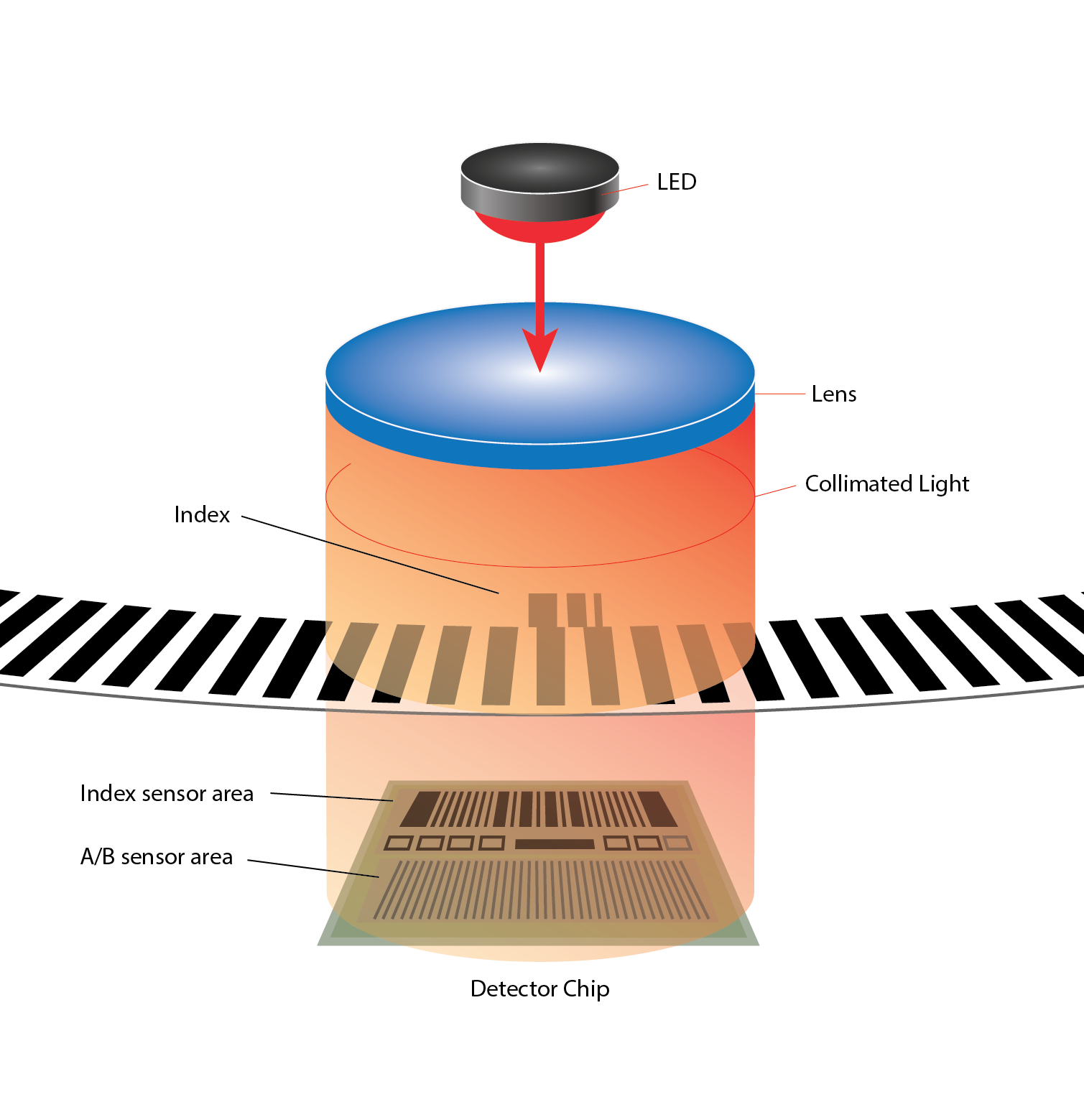
Our incremental encoders with Index have a unique pattern of lines added to a track inside the main track used for Channels A and B. A photo detector area is also added to the chip directly below the Index track. The output of this track is a third channel called Index, Z or Home.
When hooked up to an oscilloscope, this is what the outputs of the encoder looks like:
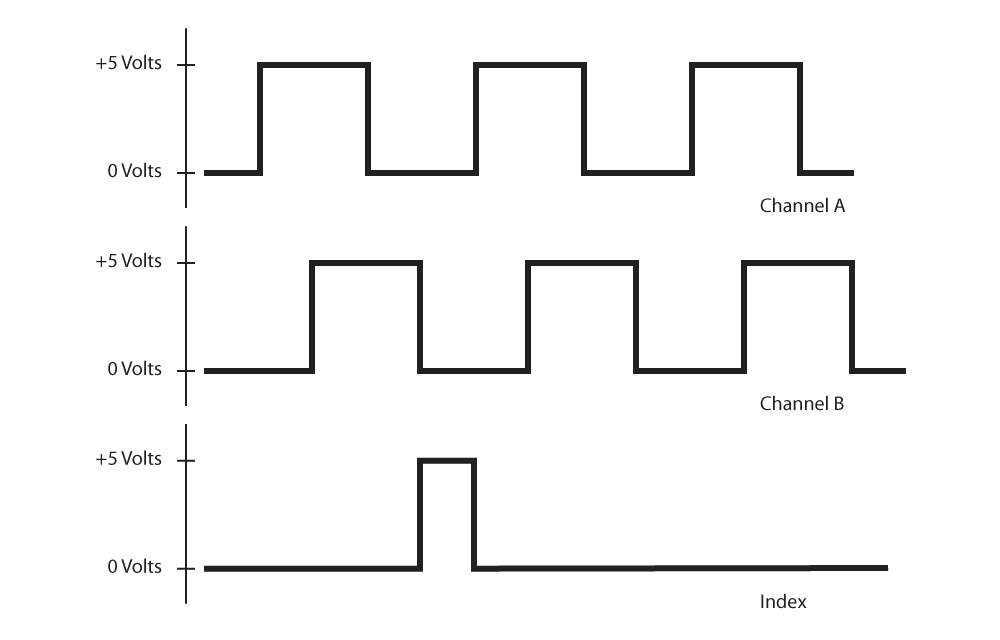
As the encoder disk rotates, the Index Channel will change its output to high in precisely one position. This known position can be used to perform a homing move upon powering up, or after an unexpected power cycle. You can also use the Index to count rotations of a disk for an application with multiple turns.
It is also possible to have multiple Indices on one encoder disk, but that’s a custom solution. If you need an encoder that knows it’s exact position at all times without performing a homing move, you should consider an absolute encoder.
Looking for more information on encoders? Be sure to check out other posts on our blog and our YouTube Channel for more guides, tips and tutorials.
More in News
Stay up to date
Sign up for our newsletter to stay up to date with our product updates, blog posts, videos and white papers.
Published in
News >
Blog