 Quality Products
Quality Products Same Day Fulfillment
Same Day Fulfillment Stellar Support
Stellar SupportPopular Encoders



Latest News
Encoder Support Videos That Work Around the Clock
Discover how US Digital simplifies processes for its customers and employees, with a focus on their ongoing success. How can we contribute to your success? More…

40 percent smaller than our S4T, but with higher resolution. Up to 4,096 CPR before quadrature and available with index.
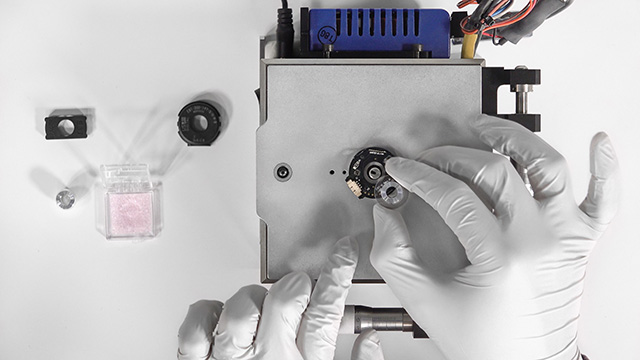
We have now updated and expanded our kit encoder assembly videos. Assembly videos for the E2, E3, E5, E6, E4T, and E8T encoder are now available.

We've been making encoders and motion control products for over 40 years. Discover why our history, culture, and devotion to our customers' success makes us unique in the manufacturing world.
Discover how US Digital simplifies processes for its customers and employees, with a focus on their ongoing success. How can we contribute to your success? More…